|
Zhizhou Sha Hi! I am Zhizhou Sha, a first-year Ph.D. student in Computer Science at the University of Texas at Austin. My research focuses on LLMs post-training, reinforcement learning, and agentic systems.
Email / WeChat / Google Scholar / Github |

|
{kind=link}
Selected Publications |
|
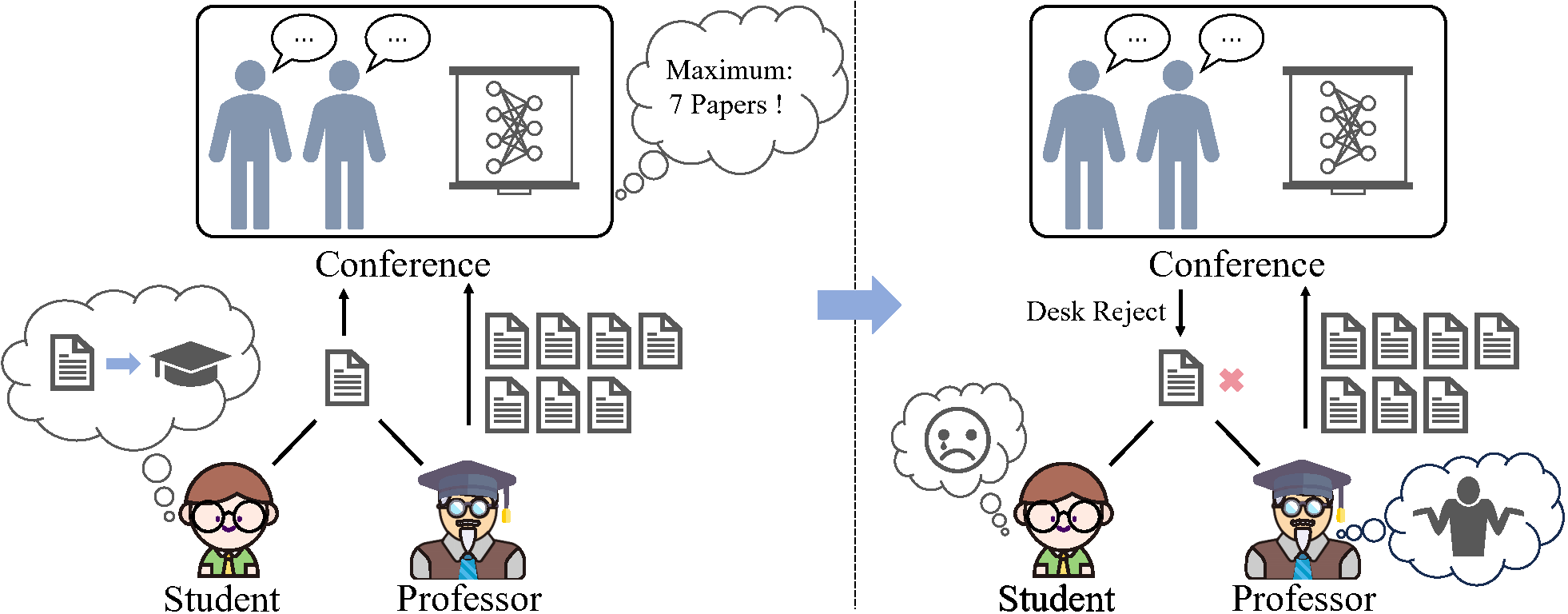
Dissecting submission limit in desk-rejections: A mathematical analysis of fairness in ai conference policies
(Alphabetical Order) Yuefan Cao, Xiaoyu Li, Yingyu Liang, Zhizhou Sha, Zhenmei Shi, Zhao Song, Jiahao Zhang ICML 2025 paper |
|
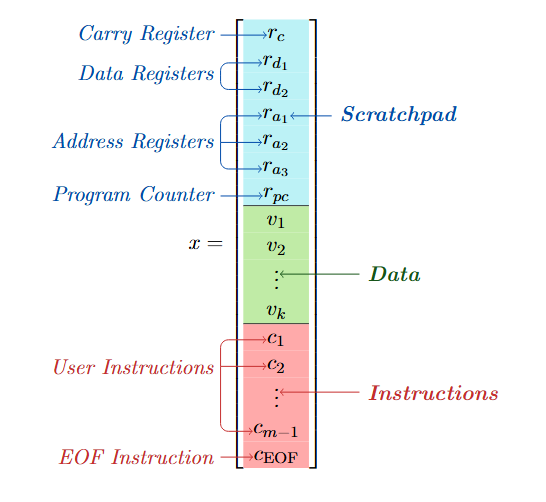
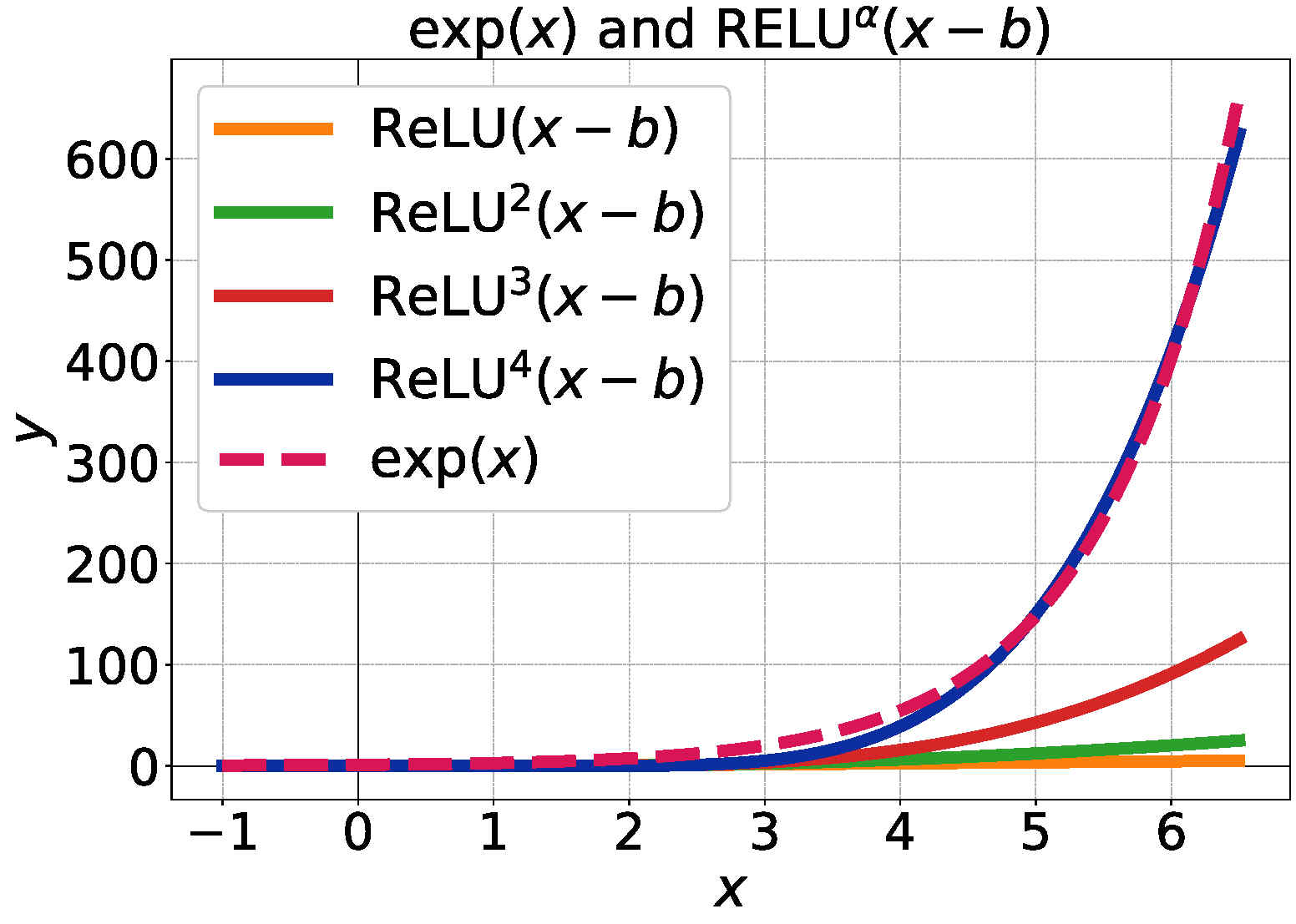
Looped ReLU MLPs May Be All You Need as Programmable Computers
(Alphabetical Order) Yingyu Liang, Zhizhou Sha, Zhenmei Shi, Zhao Song, Yufa Zhou AISTATS 2025 paper |
|
HSR-Enhanced Sparse Attention Acceleration
(Alphabetical Order) Bo Chen, Yingyu Liang, Zhizhou Sha, Zhenmei Shi, Zhao Song, Yufa Zhou CPAL 2025 paper / poster |

|
TokenCompose: Text-to-Image Diffusion with Token-level Supervision
Zirui Wang, Zhizhou Sha, Zheng Ding, Yilin Wang, Zhuowen Tu CVPR 2024 paper / code / website |
|
This is the source code from Jon Barron. Thanks to him for sharing this beautiful template! |